
Illustration: Steve Stankiewicz
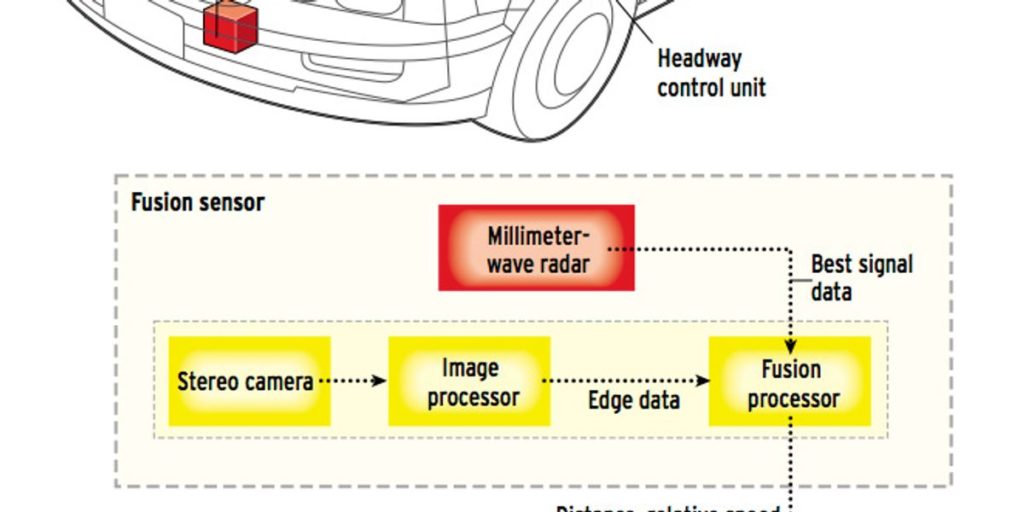
Next Generation of Cruise Control: A prototype “fusion processor” from Fujitsu Ten Ltd. depends on optical and radar sensors to move a car automatically at the varying speeds of traffic. A camera and radar report on the width, distance , and speed of objects ahead, and the processor combines the data, feeding it to a unit that controls the car.
Click on the image to enlarge.
Stop-and-go, automatically
Meanwhile at Fujitsu Ten Ltd., Plymouth, Mich., engineers are working toward another vision of the future of adaptive cruise control–one targeted squarely at the realities of driving on often congested urban and suburban highways. Fujitsu Ten has demonstrated a prototype system for so-called stop-and-go adaptive cruise control. Ordinary ACC systems maintain safe distances between cars at speeds above 40 km/h, whereas Fujitsu Ten’s system will work primarily at lower speeds in heavy traffic. If the car in front of it stops, it will bring a vehicle to a complete stop. Afterward, it will not re-engage the throttle–that’s up to the driver–but as soon as the throttle is engaged, it will accelerate and decelerate along with the leading car over any range of speeds between zero and the cruising speed set by the driver.
This so-called fusion sensor gets its name from the linking of the enhanced millimeter-wave radar from Fujitsu Ten’s first-generation ACC system to a 640-by-480-pixel stereo camera with a 40-degree viewing angle. The camera, which uses two CMOS image sensors spaced 20 cm apart, is mounted inside the car between the windshield and the rear-view mirror [see illustration, above ].

Illustration: Steve Stankiewicz; Photo: Michael R. Vella
Following the Leader: The Fujitsu Ten system keeps a safe distance behind cars in its lane [reaction zone] by combining radar data on distance with stereo-camera data on the size of objects. The camera derives the width of cars by detecting their edges [red dots, and yellow boxes in the photo]. Objects that are too wide, like a bridge abutment, are ignored. The system’s wide field of view allows it to continue tracking vehicles around
Click on the image to enlarge.
The radar and the cameras work together to track the car ahead and distinguish it from extraneous nonmoving objects more rapidly than would be possible with either alone, according to Keiji Fujimura, a senior manager at Fujitsu Ten. While the radar homes in on the lead car’s rear bumper, the stereo camera is constantly measuring the widths of all the items in its wide field of view [see illustration, above ]. To calculate them, it uses an algorithm based on the detection of vertical edges and the distance. Bridges, trees, and other stationary objects that are much wider or narrower than a car are quickly rejected as reasons for the system to apply the brakes. The concentration on vertical edges also helped hold down the cost and complexity of the optical system.
The camera’s wide field, along with the radar’s wider-than-average 16-degree field of view, enhances the system’s performance on tight curves, enabling it to continue tracking the lead car as the latter enters the curve and moves to one side or the other. Fujitsu Ten plans to improve the unit with a phased-array radar that “scans” by altering the relative phase of the signals emitted from a group of antennas and, consequently, the direction of the emitted beam. This beam-shifting occurs almost instantaneously, because no component has to be physically moved. In a collision-avoidance system, overall reaction time could be reduced. There are other advantages; beam-shifting in a phased array is more precise than scanning an antenna mechanically, and the unit lasts longer because no movement means no wear. Better still, the shape of the beam, which defines the scanning area, can be changed on the fly in response to changing road conditions, said Fujimura.
The system has worked well in trials, Fujimura added; nevertheless, it is not slated to go into production until 2004. Like its competitors, Fujitsu Ten is hoping to grab a share of a global market for first-generation ACC that is expected to reach $2.4 billion by 2010. By 2006, collision avoidance will be in 17 percent of new cars in Europe, 14 percent in Asia-Pacific Rim, and 13 percent in North America, according to Morris Kindig, president of Tier One.
